【深度学习】基于PyTorch搭建ResNet18、ResNet34、ResNet50、ResNet101、ResNet152网络_resnet34 resnet101-程序员宅基地
技术标签: resnet 深度学习 pytorch resnet18 34 resnet 101 152
一、使用PyTorch搭建ResNet18网络并使用CIFAR10数据集训练测试
1. ResNet18网络结构
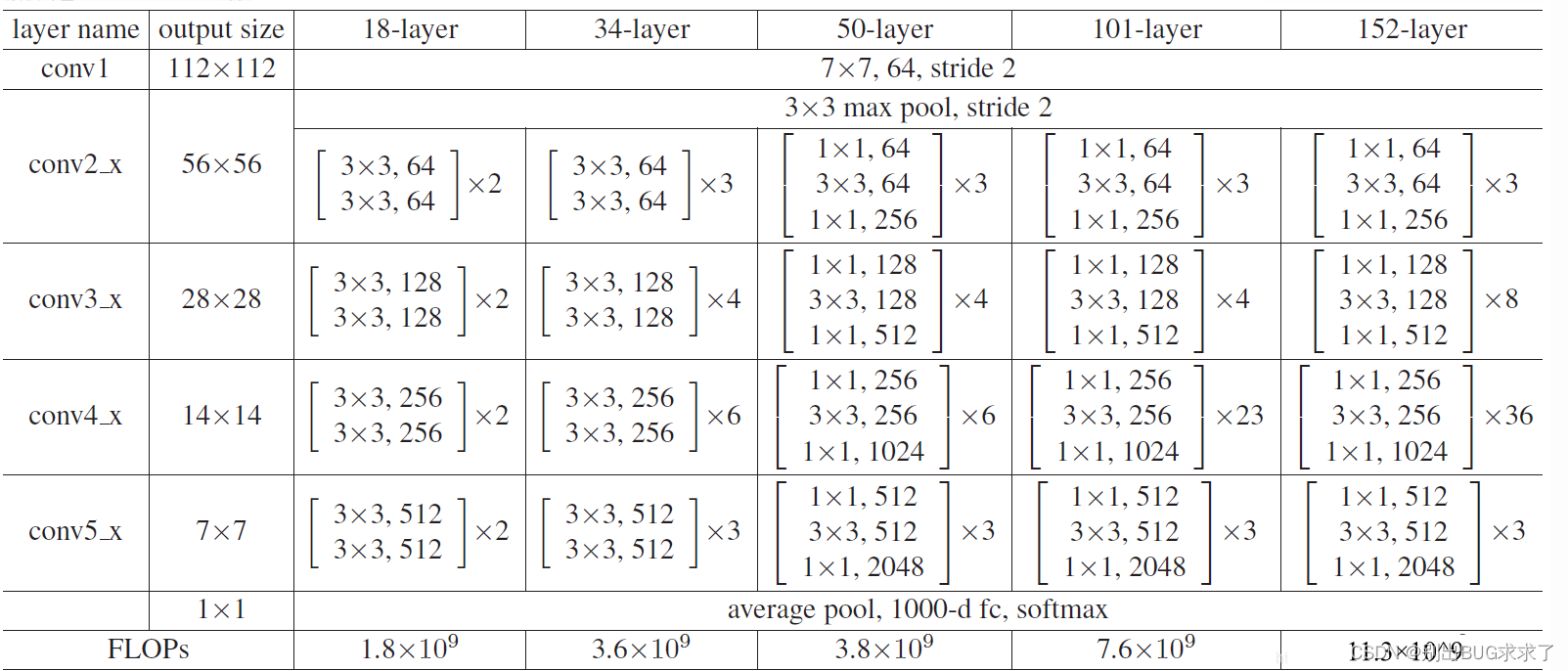
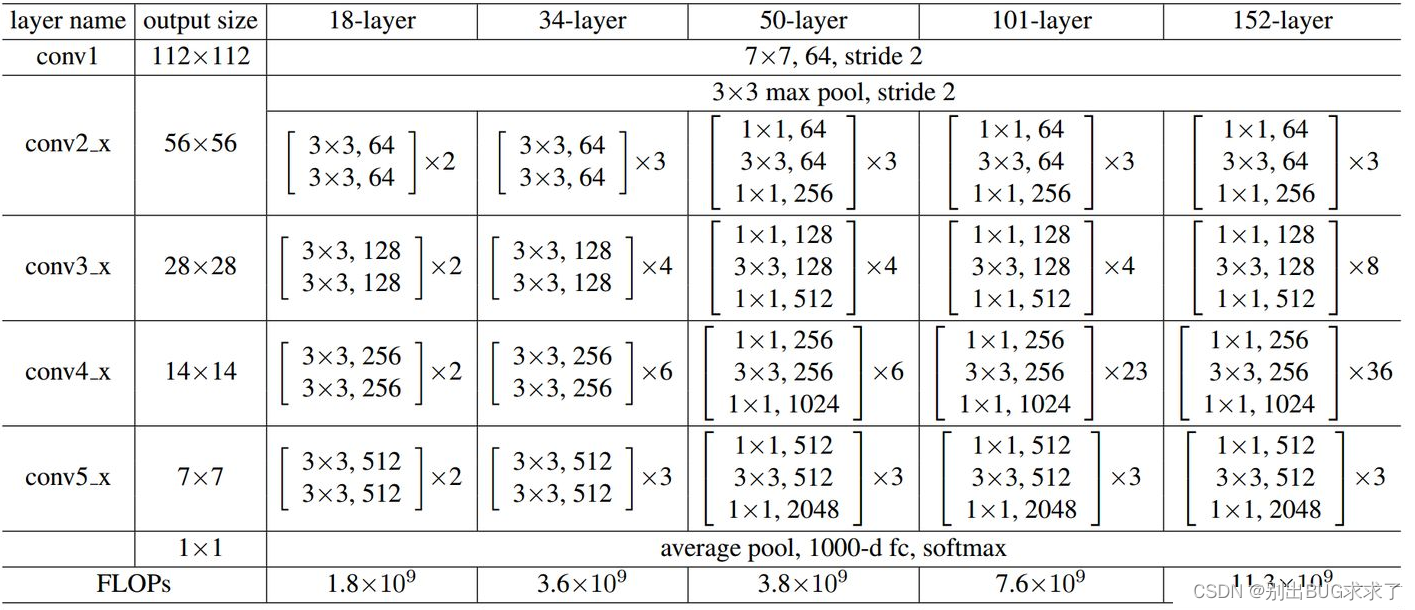
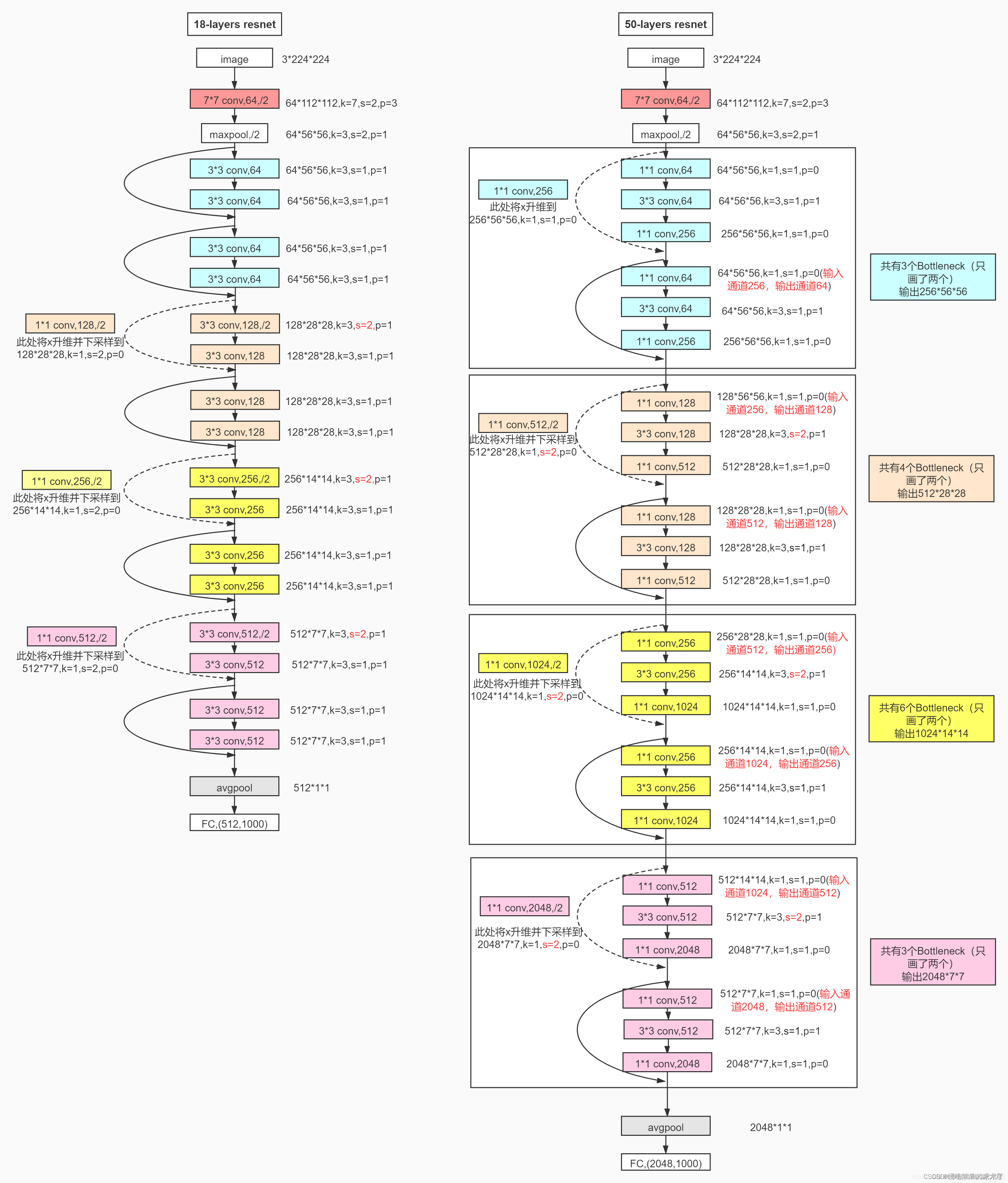
所有不同层数的ResNet:
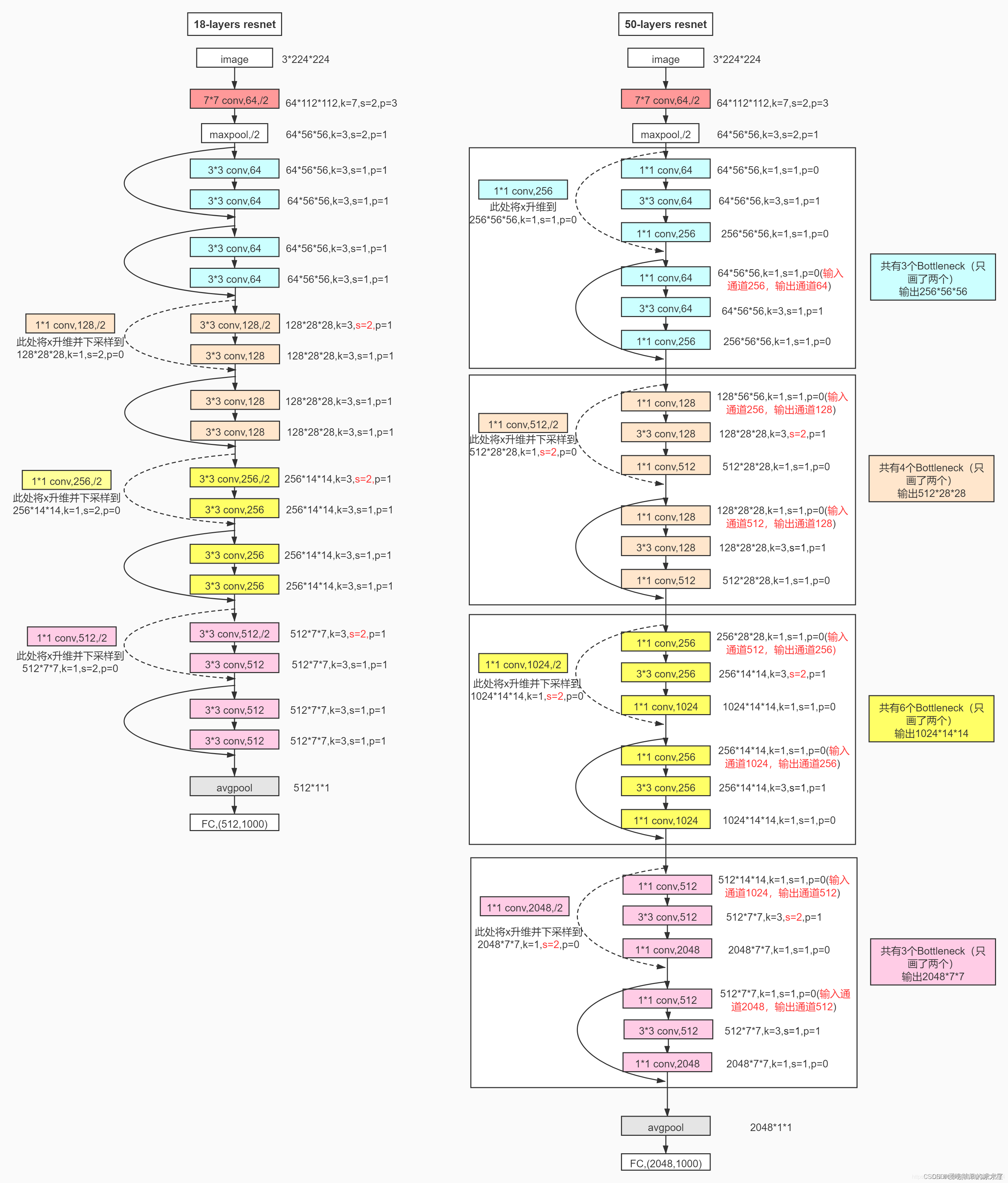
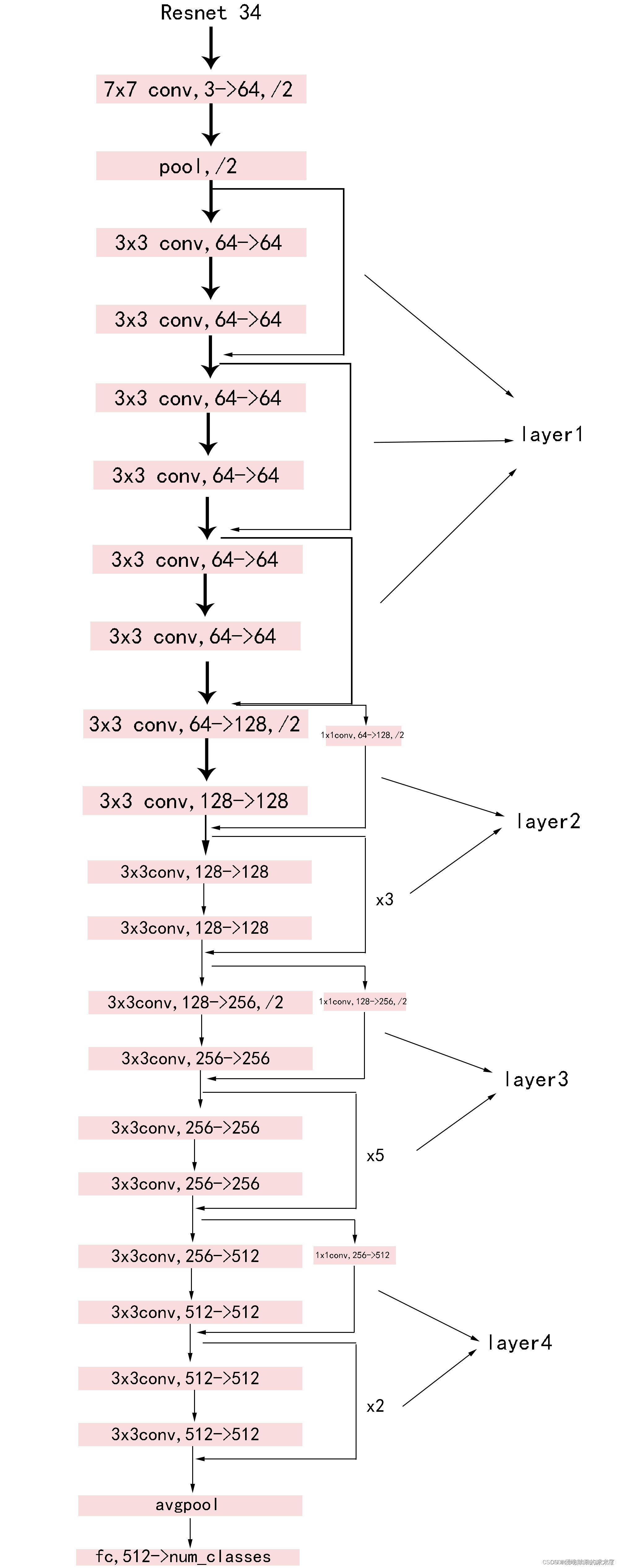
这里给出了我认为比较详细的ResNet18网络具体参数和执行流程图:
2. 实现代码
这里并未采用BasicBlock和BottleNeck复现ResNet18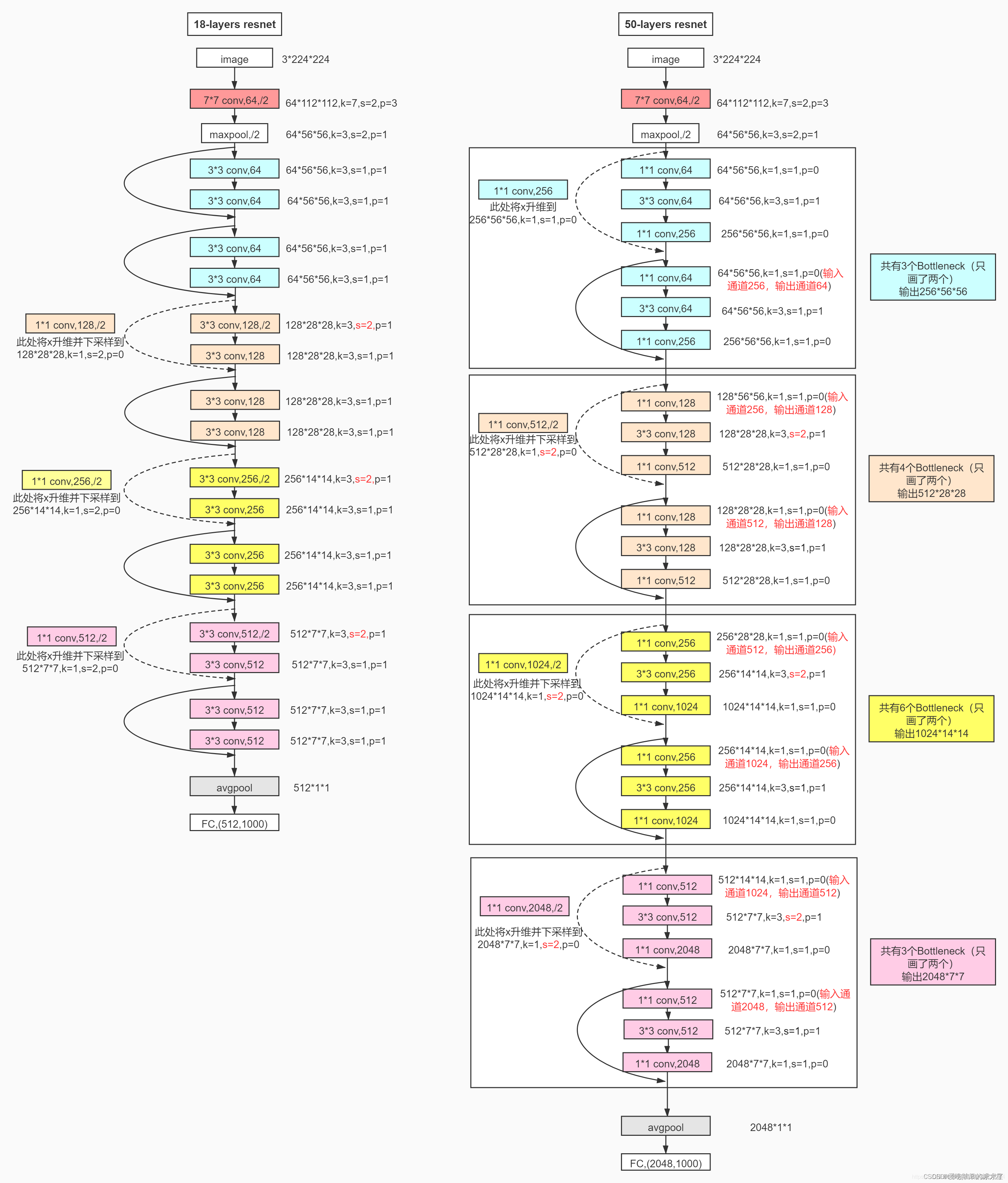
具体ResNet原理细节这里不多做描述,直接上代码
model.py网络模型部分:
import torch
import torch.nn as nn
from torch.nn import functional as F
"""
把ResNet18的残差卷积单元作为一个Block,这里分为两种:一种是CommonBlock,另一种是SpecialBlock,最后由ResNet18统筹调度
其中SpecialBlock负责完成ResNet18中带有虚线(升维channel增加和下采样操作h和w减少)的Block操作
其中CommonBlock负责完成ResNet18中带有实线的直接相连相加的Block操作
注意ResNet18中所有非shortcut部分的卷积kernel_size=3, padding=1,仅仅in_channel, out_channel, stride的不同
注意ResNet18中所有shortcut部分的卷积kernel_size=1, padding=0,仅仅in_channel, out_channel, stride的不同
"""
class CommonBlock(nn.Module):
def __init__(self, in_channel, out_channel, stride): # 普通Block简单完成两次卷积操作
super(CommonBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channel)
self.conv2 = nn.Conv2d(out_channel, out_channel, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channel)
def forward(self, x):
identity = x # 普通Block的shortcut为直连,不需要升维下采样
x = F.relu(self.bn1(self.conv1(x)), inplace=True) # 完成一次卷积
x = self.bn2(self.conv2(x)) # 第二次卷积不加relu激活函数
x += identity # 两路相加
return F.relu(x, inplace=True) # 添加激活函数输出
class SpecialBlock(nn.Module): # 特殊Block完成两次卷积操作,以及一次升维下采样
def __init__(self, in_channel, out_channel, stride): # 注意这里的stride传入一个数组,shortcut和残差部分stride不同
super(SpecialBlock, self).__init__()
self.change_channel = nn.Sequential( # 负责升维下采样的卷积网络change_channel
nn.Conv2d(in_channel, out_channel, kernel_size=1, stride=stride[0], padding=0, bias=False),
nn.BatchNorm2d(out_channel)
)
self.conv1 = nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=stride[0], padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channel)
self.conv2 = nn.Conv2d(out_channel, out_channel, kernel_size=3, stride=stride[1], padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channel)
def forward(self, x):
identity = self.change_channel(x) # 调用change_channel对输入修改,为后面相加做变换准备
x = F.relu(self.bn1(self.conv1(x)), inplace=True)
x = self.bn2(self.conv2(x)) # 完成残差部分的卷积
x += identity
return F.relu(x, inplace=True) # 输出卷积单元
class ResNet18(nn.Module):
def __init__(self, classes_num):
super(ResNet18, self).__init__()
self.prepare = nn.Sequential( # 所有的ResNet共有的预处理==》[batch, 64, 56, 56]
nn.Conv2d(3, 64, 7, 2, 3),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(3, 2, 1)
)
self.layer1 = nn.Sequential( # layer1有点特别,由于输入输出的channel均是64,故两个CommonBlock
CommonBlock(64, 64, 1),
CommonBlock(64, 64, 1)
)
self.layer2 = nn.Sequential( # layer234类似,由于输入输出的channel不同,故一个SpecialBlock,一个CommonBlock
SpecialBlock(64, 128, [2, 1]),
CommonBlock(128, 128, 1)
)
self.layer3 = nn.Sequential(
SpecialBlock(128, 256, [2, 1]),
CommonBlock(256, 256, 1)
)
self.layer4 = nn.Sequential(
SpecialBlock(256, 512, [2, 1]),
CommonBlock(512, 512, 1)
)
self.pool = nn.AdaptiveAvgPool2d(output_size=(1, 1)) # 卷积结束,通过一个自适应均值池化==》 [batch, 512, 1, 1]
self.fc = nn.Sequential( # 最后用于分类的全连接层,根据需要灵活变化
nn.Dropout(p=0.5),
nn.Linear(512, 256),
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(256, classes_num) # 这个使用CIFAR10数据集,定为10分类
)
def forward(self, x):
x = self.prepare(x) # 预处理
x = self.layer1(x) # 四个卷积单元
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.pool(x) # 池化
x = x.reshape(x.shape[0], -1) # 将x展平,输入全连接层
x = self.fc(x)
return x
train.py训练部分(使用CIFAR10数据集):
import torch
import visdom
from torch.utils.data import DataLoader
from torchvision import datasets, transforms
from PIL import Image
from matplotlib import pyplot as plt
import numpy as np
from ResNet18 import ResNet18
from torch.nn import CrossEntropyLoss
from torch import optim
BATCH_SIZE = 512 # 超参数batch大小
EPOCH = 30 # 总共训练轮数
save_path = "./CIFAR10_ResNet18.pth" # 模型权重参数保存位置
# classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck') # CIFAR10数据集类别
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") # 创建GPU运算环境
print(device)
data_transform = {
# 数据预处理
"train": transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
]),
"val": transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
])
}
# 加载数据集,指定训练或测试数据,指定于处理方式
train_data = datasets.CIFAR10(root='./CIFAR10/', train=True, transform=data_transform["train"], download=True)
test_data = datasets.CIFAR10(root='./CIFAR10/', train=False, transform=data_transform["val"], download=True)
train_dataloader = torch.utils.data.DataLoader(train_data, BATCH_SIZE, True, num_workers=0)
test_dataloader = torch.utils.data.DataLoader(test_data, BATCH_SIZE, False, num_workers=0)
# # 展示图片
# x = 0
# for images, labels in train_data:
# plt.subplot(3,3,x+1)
# plt.tight_layout()
# images = images.numpy().transpose(1, 2, 0) # 把channel那一维放到最后
# plt.title(str(classes[labels]))
# plt.imshow(images)
# plt.xticks([])
# plt.yticks([])
# x += 1
# if x == 9:
# break
# plt.show()
# 创建一个visdom,将训练测试情况可视化
viz = visdom.Visdom()
# 测试函数,传入模型和数据读取接口
def evalute(model, loader):
# correct为总正确数量,total为总测试数量
correct = 0
total = len(loader.dataset)
# 取测试数据
for x, y in loader:
x, y = x.to(device), y.to(device)
# validation和test过程不需要反向传播
model.eval()
with torch.no_grad():
out = model(x) # 计算测试数据的输出logits
# 计算出out在第一维度上最大值对应编号,得模型的预测值
prediction = out.argmax(dim=1)
# 预测正确的数量correct
correct += torch.eq(prediction, y).float().sum().item()
# 最终返回正确率
return correct / total
net = ResNet18()
net.to(device) # 实例化网络模型并送入GPU
net.load_state_dict(torch.load(save_path)) # 使用上次训练权重接着训练
optimizer = optim.Adam(net.parameters(), lr=0.001) # 定义优化器
loss_function = CrossEntropyLoss() # 多分类问题使用交叉熵损失函数
best_acc, best_epoch = 0.0, 0 # 最好准确度,出现的轮数
global_step = 0 # 全局的step步数,用于画图
for epoch in range(EPOCH):
running_loss = 0.0 # 一次epoch的总损失
net.train() # 开始训练
for step, (images, labels) in enumerate(train_dataloader, start=0):
images, labels = images.to(device), labels.to(device)
optimizer.zero_grad()
outputs = net(images)
loss = loss_function(outputs, labels)
loss.backward()
optimizer.step()
running_loss += loss.item() # 将一个epoch的损失累加
# 打印输出当前训练的进度
rate = (step + 1) / len(train_dataloader)
a = "*" * int(rate * 50)
b = "." * int((1 - rate) * 50)
print("\repoch: {} train loss: {:^3.0f}%[{}->{}]{:.3f}".format(epoch+1, int(rate * 100), a, b, loss), end="")
# 记录test的loss
viz.line([loss.item()], [global_step], win='loss', update='append')
# 每次记录之后将横轴x的值加一
global_step += 1
# 在每一个epoch结束,做一次test
if epoch % 1 == 0:
# 使用上面定义的evalute函数,测试正确率,传入测试模型net,测试数据集test_dataloader
test_acc = evalute(net, test_dataloader)
print(" epoch{} test acc:{}".format(epoch+1, test_acc))
# 根据目前epoch计算所得的acc,看看是否需要保存当前状态(即当前的各项参数值)以及迭代周期epoch作为最好情况
if test_acc > best_acc:
# 保存最好数据
best_acc = test_acc
best_epoch = epoch
# 保存最好的模型参数值状态
torch.save(net.state_dict(), save_path)
# 记录validation的val_acc
viz.line([test_acc], [global_step], win='test_acc', update='append')
print("Finish !")
3. 训练测试结果
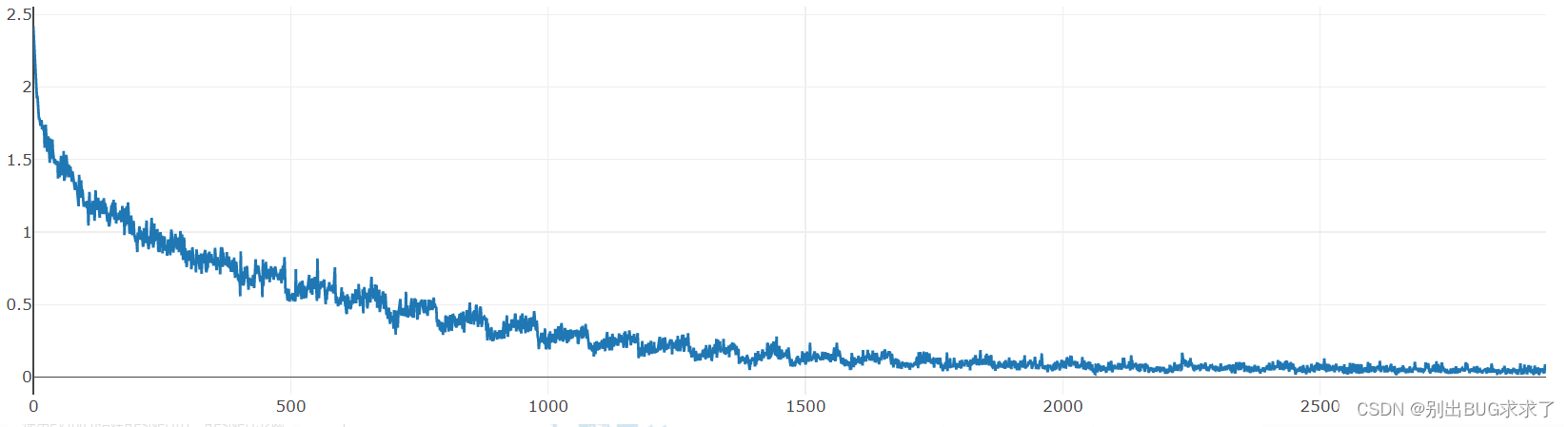
训练损失:
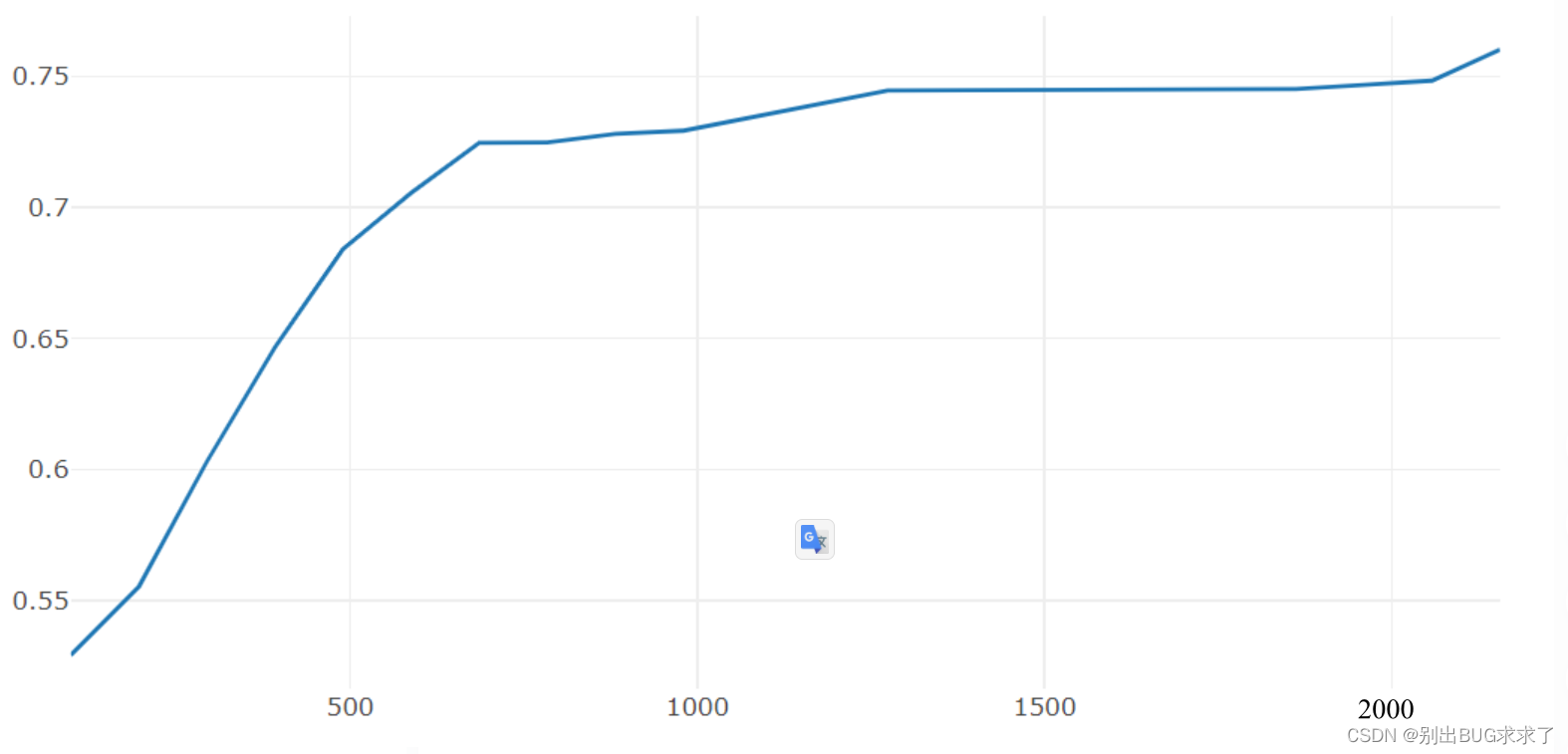
每一个epoch结束之后的测试:
训练时多次修改超参数,最后经过30次epoch之后的测试准确度达到了0.7471,没有在训练下去也没有明显提升,初学深度神经网络,第一次搭建ResNet,我的数据处理等方面处理的有一定欠缺,大家有好的建议也可以提出来
二、使用PyTorch搭建ResNet34网络
1. ResNet34网络结构
参照ResNet18的搭建,由于34层和18层几乎相同,叠加卷积单元数即可,所以没有写注释,具体可以参考我的ResNet18搭建中的注释,ResNet34的训练部分也可以参照。
2. 实现代码
import torch
import torch.nn as nn
from torch.nn import functional as F
class CommonBlock(nn.Module):
def __init__(self, in_channel, out_channel, stride):
super(CommonBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channel)
self.conv2 = nn.Conv2d(out_channel, out_channel, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channel)
def forward(self, x):
identity = x
x = F.relu(self.bn1(self.conv1(x)), inplace=True)
x = self.bn2(self.conv2(x))
x += identity
return F.relu(x, inplace=True)
class SpecialBlock(nn.Module):
def __init__(self, in_channel, out_channel, stride):
super(SpecialBlock, self).__init__()
self.change_channel = nn.Sequential(
nn.Conv2d(in_channel, out_channel, kernel_size=1, stride=stride[0], padding=0, bias=False),
nn.BatchNorm2d(out_channel)
)
self.conv1 = nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=stride[0], padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channel)
self.conv2 = nn.Conv2d(out_channel, out_channel, kernel_size=3, stride=stride[1], padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channel)
def forward(self, x):
identity = self.change_channel(x)
x = F.relu(self.bn1(self.conv1(x)), inplace=True)
x = self.bn2(self.conv2(x))
x += identity
return F.relu(x, inplace=True)
class ResNet34(nn.Module):
def __init__(self, classes_num):
super(ResNet34, self).__init__()
self.prepare = nn.Sequential(
nn.Conv2d(3, 64, 7, 2, 3),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(3, 2, 1)
)
self.layer1 = nn.Sequential(
CommonBlock(64, 64, 1),
CommonBlock(64, 64, 1),
CommonBlock(64, 64, 1)
)
self.layer2 = nn.Sequential(
SpecialBlock(64, 128, [2, 1]),
CommonBlock(128, 128, 1),
CommonBlock(128, 128, 1),
CommonBlock(128, 128, 1)
)
self.layer3 = nn.Sequential(
SpecialBlock(128, 256, [2, 1]),
CommonBlock(256, 256, 1),
CommonBlock(256, 256, 1),
CommonBlock(256, 256, 1),
CommonBlock(256, 256, 1),
CommonBlock(256, 256, 1)
)
self.layer4 = nn.Sequential(
SpecialBlock(256, 512, [2, 1]),
CommonBlock(512, 512, 1),
CommonBlock(512, 512, 1)
)
self.pool = nn.AdaptiveAvgPool2d(output_size=(1, 1))
self.fc = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(512, 256),
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(256, classes_num)
)
def forward(self, x):
x = self.prepare(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.pool(x)
x = x.reshape(x.shape[0], -1)
x = self.fc(x)
return x
三、使用PyTorch搭建ResNet50网络
看过我之前ResNet18和ResNet34搭建的朋友可能想着可不可以把搭建18和34层的方法直接用在50层以上的ResNet的搭建中,我也尝试过。但是ResNet50以上的网络搭建不像是18到34层只要简单修改卷积单元数目就可以完成,ResNet50以上的三种网络都是一个样子,只是层数不同,所以完全可以将34到50层作为一个搭建分水岭。
加上我初学PyTorch和深度神经网络,对于采用BasicBlock和BottleNeck的高效率构建还不是很懂,所以这里给出了类似前两种ResNet的简单暴力堆叠网络层的构建方法
1. ResNet50网络结构
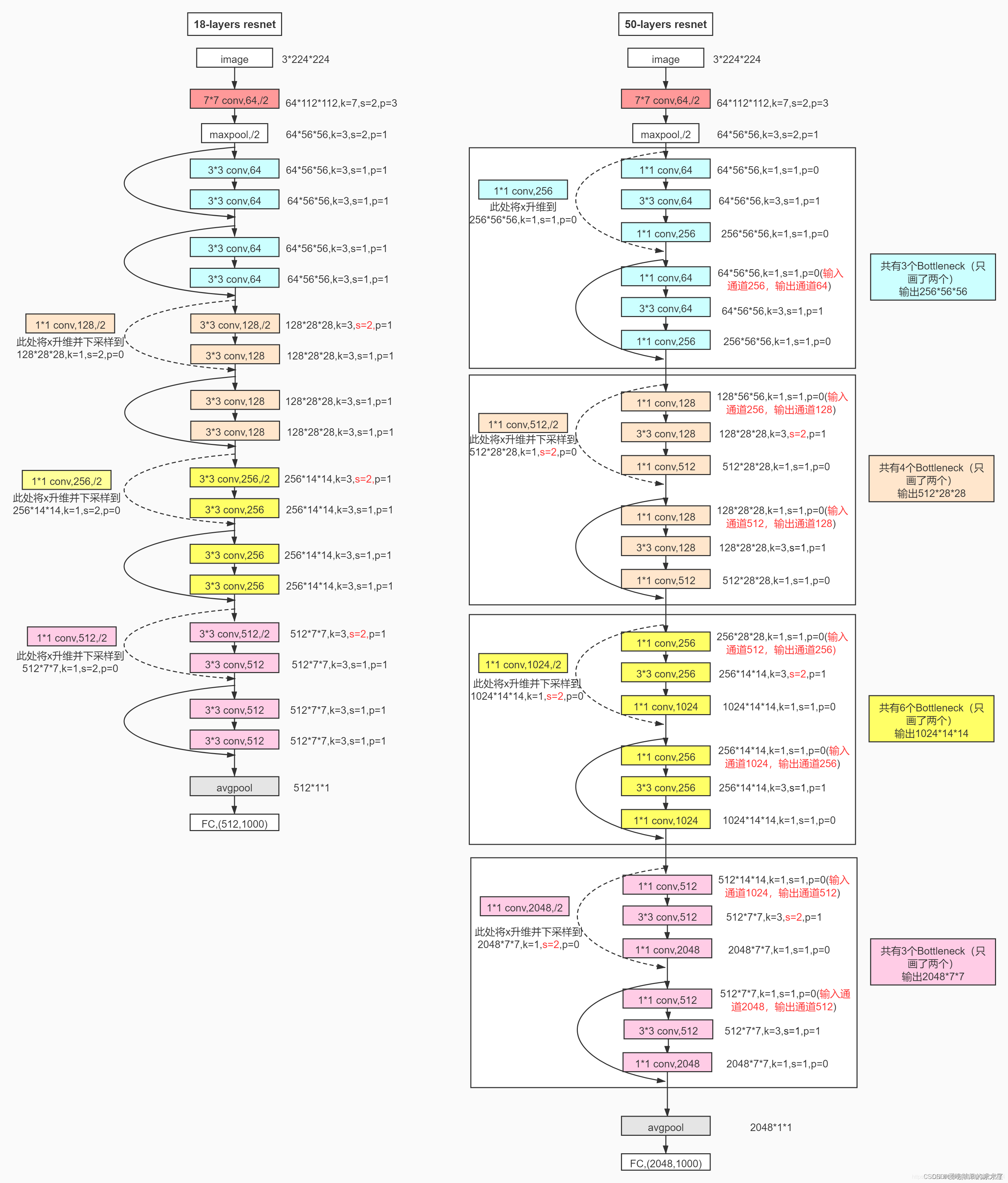
所有不同层数的ResNet:
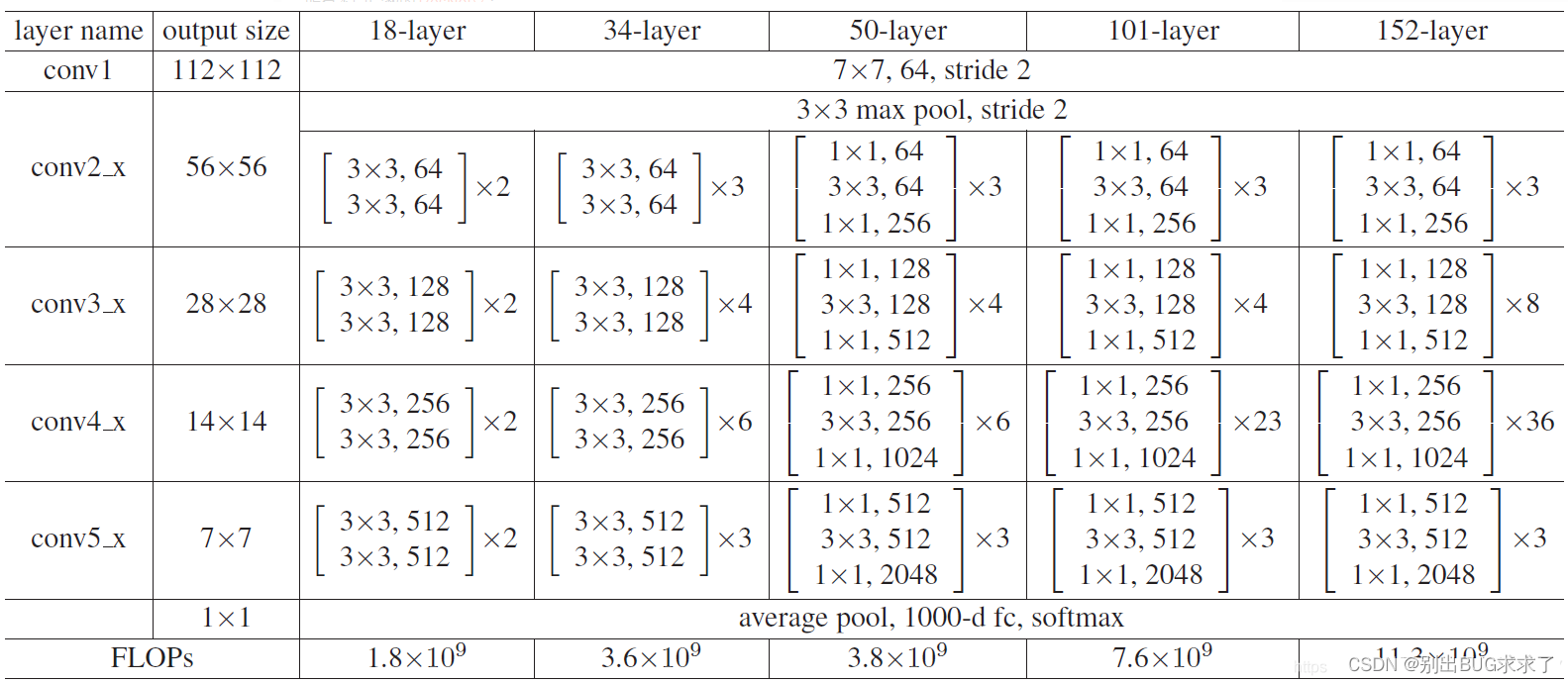
这里给出了我认为比较详细的ResNet50网络具体参数和执行流程图:
2. 实现代码
model.py模型部分:
import torch
import torch.nn as nn
from torch.nn import functional as F
"""
这里的ResNet50的搭建是暴力形式,直接累加完成搭建,没采用BasicBlock和BottleNeck
第一个DownSample类,用于定义shortcut的模型函数,完成两个layer之间虚线的shortcut,负责layer1虚线的升4倍channel以及其他layer虚线的升2倍channel
观察每一个layer的虚线处升channel仅仅是升channel前后的数量不同以及stride不同,对于kernel_size和padding都分别是1和0,不作为DownSample网络类的模型参数
参数in_channel即是升之前的通道数, out_channel即是升之后的通道数, stride即是每一次升channel不同的stride步长,对于layer1升通道的stride=1,其他layer升通道的stride=2,注意不同
"""
"""
运行时一定要注意:
本网络中的ResNet50类中forward函数里面:layer1_shortcut1.to('cuda:0');layer2_shortcut1.to('cuda:0')等语句,是将实例化的DownSample
网络模型放到train.py训练脚本中定义的GPU同一环境下,不加此句一般会如下报错:
Input type (torch.cuda.FloatTensor) and weight type (torch.FloatTensor) should be the same
"""
class DownSample(nn.Module):
def __init__(self, in_channel, out_channel, stride): # 传入下采样的前后channel数以及stride步长
super(DownSample, self).__init__() # 继承父类
self.down = nn.Sequential( # 定义一个模型容器down
nn.Conv2d(in_channel, out_channel, kernel_size=1, stride=stride, padding=0, bias=False), # 负责虚线shortcut的唯一且重要的一次卷积
nn.BatchNorm2d(out_channel), # 在卷积和ReLU非线性激活之间,添加BatchNormalization
nn.ReLU(inplace=True) # shortcut最后加入一个激活函数,置inplace=True原地操作,节省内存
)
def forward(self, x):
out = self.down(x) # 前向传播函数仅仅完成down这个容器的操作
return out
"""
第一个ResNet50类,不使用BottleNeck单元完成ResNet50层以上的搭建,直接使用forward再加上前面的DownSample模型类函数,指定ResNet50所有参数构建模型
"""
class ResNet50(nn.Module):
def __init__(self, classes_num): # ResNet50仅传一个分类数目,将涉及的所有数据写死,具体数据可以参考下面的图片
super(ResNet50, self).__init__()
# 在进入layer1234之间先进行预处理,主要是一次卷积一次池化,从[batch, 3, 224, 224] => [batch, 64, 56, 56]
self.pre = nn.Sequential(
# 卷积channel从原始数据的3通道,采用64个卷积核,升到64个channel,卷积核大小、步长、padding均固定
nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False),
nn.BatchNorm2d(64), # 卷积后紧接一次BatchNormalization
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1) # 预处理最后的一次最大池化操作,数据固定
)
"""
每一个layer的操作分为使用一次的first,和使用多次的next组成,first负责每个layer的第一个单元(有虚线)的三次卷积,next负责剩下单元(直连)的三次卷积
"""
# --------------------------------------------------------------
self.layer1_first = nn.Sequential(
nn.Conv2d(64, 64, kernel_size=1, stride=1, padding=0, bias=False), # layer1_first第一次卷积保持channel不变,和其他layer的first区别
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1, bias=False), # layer1_first第二次卷积stride和其他layer_first的stride不同
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 256, kernel_size=1, stride=1, padding=0, bias=False), # layer1_first第三次卷积和其他layer一样,channel升4倍
nn.BatchNorm2d(256) # 注意最后一次卷积结束不加ReLU激活函数
)
self.layer1_next = nn.Sequential(
nn.Conv2d(256, 64, kernel_size=1, stride=1, padding=0, bias=False), # layer1_next的第一次卷积负责将channel减少,减少训练参数量
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 256, kernel_size=1, stride=1, padding=0, bias=False), # layer1_next的最后一次卷积负责将channel增加至可以与shortcut相加
nn.BatchNorm2d(256)
)
# -------------------------------------------------------------- # layer234操作基本相同,这里仅介绍layer2
self.layer2_first = nn.Sequential(
nn.Conv2d(256, 128, kernel_size=1, stride=1, padding=0, bias=False), # 与layer1_first第一次卷积不同,需要降channel至1/2
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 128, kernel_size=3, stride=2, padding=1, bias=False), # 注意这里的stride=2与layer34相同,与layer1区别
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 512, kernel_size=1, stride=1, padding=0, bias=False), # 再次升channel
nn.BatchNorm2d(512)
)
self.layer2_next = nn.Sequential(
nn.Conv2d(512, 128, kernel_size=1, stride=1, padding=0, bias=False), # 负责循环普通的操作
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512)
)
# --------------------------------------------------------------
self.layer3_first = nn.Sequential(
nn.Conv2d(512, 256, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 1024, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(1024)
)
self.layer3_next = nn.Sequential(
nn.Conv2d(1024, 256, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 1024, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(1024)
)
# --------------------------------------------------------------
self.layer4_first = nn.Sequential(
nn.Conv2d(1024, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 512, kernel_size=3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 2048, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(2048)
)
self.layer4_next = nn.Sequential(
nn.Conv2d(2048, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 512, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 2048, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(2048)
)
self.avg_pool = nn.AdaptiveAvgPool2d((1, 1)) # 经过最后的自适应均值池化为[batch, 2048, 1, 1]
# 定义最后的全连接层
self.fc = nn.Sequential(
nn.Dropout(p=0.5), # 以0.5的概率失活神经元
nn.Linear(2048 * 1 * 1, 1024), # 第一个全连接层
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(1024, classes_num) # 第二个全连接层,输出类结果
)
"""
forward()前向传播函数负责将ResNet类中定义的网络层复用,再与上面的DownSample类完美组合
"""
def forward(self, x):
out = self.pre(x) # 对输入预处理,输出out = [batch, 64, 56, 56]
"""
每一层layer操作由两个部分组成,第一个是带有虚线的卷积单元,其他的是循环完成普通的shortcut为直连的卷积单元
"""
layer1_shortcut1 = DownSample(64, 256, 1) # 使用DownSample实例化一个网络模型layer1_shortcut1,参数即是虚线处升channel数据,注意stride=1
layer1_shortcut1.to('cuda:0')
layer1_identity1 = layer1_shortcut1(out) # 调用layer1_shortcut1对卷积单元输入out计算虚线处的identity,用于后面与卷积单元输出相加
out = self.layer1_first(out) # 调用layer1_first完成layer1的第一个特殊的卷积单元
out = F.relu(out + layer1_identity1, inplace=True) # 将identity与卷积单元输出相加,经过relu激活函数
for i in range(2): # 使用循环完成后面几个相同输入输出相同操作的卷积单元
layer_identity = out # 直接直连identity等于输入
out = self.layer1_next(out) # 输入经过普通卷积单元
out = F.relu(out + layer_identity, inplace=True) # 两路结果相加,再经过激活函数
# --------------------------------------------------------------后面layer234都是类似的,这里仅介绍layer2
layer2_shortcut1 = DownSample(256, 512, 2) # 注意后面layer234输入输出channel不同,stride=2都是如此
layer2_shortcut1.to('cuda:0')
layer2_identity1 = layer2_shortcut1(out)
out = self.layer2_first(out)
out = F.relu(out + layer2_identity1, inplace=True) # 完成layer2的第一个卷积单元
for i in range(3): # 循环执行layer2剩下的其他卷积单元
layer_identity = out
out = self.layer2_next(out)
out = F.relu(out + layer_identity, inplace=True)
# --------------------------------------------------------------
layer3_shortcut1 = DownSample(512, 1024, 2)
layer3_shortcut1.to('cuda:0')
layer3_identity1 = layer3_shortcut1(out)
out = self.layer3_first(out)
out = F.relu(out + layer3_identity1, inplace=True)
for i in range(5):
layer_identity = out
out = self.layer3_next(out)
out = F.relu(out + layer_identity, inplace=True)
# --------------------------------------------------------------
layer4_shortcut1 = DownSample(1024, 2048, 2)
layer4_shortcut1.to('cuda:0')
layer4_identity1 = layer4_shortcut1(out)
out = self.layer4_first(out)
out = F.relu(out + layer4_identity1, inplace=True)
for i in range(2):
layer_identity = out
out = self.layer4_next(out)
out = F.relu(out + layer_identity, inplace=True)
# 最后一个全连接层
out = self.avg_pool(out) # 经过最后的自适应均值池化为[batch, 2048, 1, 1]
out = out.reshape(out.size(0), -1) # 将卷积输入[batch, 2048, 1, 1]展平为[batch, 2048*1*1]
out = self.fc(out) # 经过最后一个全连接单元,输出分类out
return out
ResNet50的训练可以参照前面ResNet18搭建中的训练和测试部分:
经过手写ResNet50网络模型的暴力搭建,我认识到了要想把ResNet及其其他复杂网络的搭建,前提必须要把模型整个流程环节全部弄清楚
例如,ResNet50里面每一次的shortcut里面的升维操作的in_channel,out_channel,kernel_size,stride,padding的参数大小变化
每一个卷积单元具体参数都是什么样的,如何才能最大化简化代码;
还有就是搭建复杂的网络模型中,一定要做到步步为营,一步步搭建并检验,每一步都要理解有理有据,最后才能将整个网络搭建起来
还有一个意外收获就是在训练过程中,发现了这样的报错:
Input type (torch.cuda.FloatTensor) and weight type (torch.FloatTensor) should be the same
原来是因为输入的数据类型为torch.cuda.FloatTensor,说明输入数据在GPU中。模型参数的数据类型为torch.FloatTensor,说明模型还在CPU
故在ResNet50的forward()函数中对实例化的DownSample网络添加到和train.py对ResNet50实例化的网络模型的同一个GPU下,解决了错误
四、使用PyTorch搭建ResNet101、ResNet152网络
参照前面ResNet50的搭建,由于50层以上几乎相同,叠加卷积单元数即可,所以没有写注释。
ResNet101和152的搭建注释可以参照我的ResNet50搭建中的注释
ResNet101和152的训练可以参照我的ResNet18搭建中的训练部分
ResNet101和152可以依旧参照ResNet50的网络图片:
1. 网络结构
2. 实现代码
(1)ResNet101的model.py模型:
import torch
import torch.nn as nn
from torch.nn import functional as F
class DownSample(nn.Module):
def __init__(self, in_channel, out_channel, stride):
super(DownSample, self).__init__()
self.down = nn.Sequential(
nn.Conv2d(in_channel, out_channel, kernel_size=1, stride=stride, padding=0, bias=False),
nn.BatchNorm2d(out_channel),
nn.ReLU(inplace=True)
)
def forward(self, x):
out = self.down(x)
return out
class ResNet101(nn.Module):
def __init__(self, classes_num): # 指定分类数
super(ResNet101, self).__init__()
self.pre = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
# --------------------------------------------------------------------
self.layer1_first = nn.Sequential(
nn.Conv2d(64, 64, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 256, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(256)
)
self.layer1_next = nn.Sequential(
nn.Conv2d(256, 64, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 256, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(256)
)
# --------------------------------------------------------------------
self.layer2_first = nn.Sequential(
nn.Conv2d(256, 128, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 128, kernel_size=3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512)
)
self.layer2_next = nn.Sequential(
nn.Conv2d(512, 128, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512)
)
# --------------------------------------------------------------------
self.layer3_first = nn.Sequential(
nn.Conv2d(512, 256, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 1024, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(1024)
)
self.layer3_next = nn.Sequential(
nn.Conv2d(1024, 256, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 1024, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(1024)
)
# --------------------------------------------------------------------
self.layer4_first = nn.Sequential(
nn.Conv2d(1024, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 512, kernel_size=3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 2048, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(2048)
)
self.layer4_next = nn.Sequential(
nn.Conv2d(2048, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 512, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 2048, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(2048)
)
# --------------------------------------------------------------------
self.avg_pool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(2048 * 1 * 1, 1000),
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(1000, classes_num)
)
def forward(self, x):
out = self.pre(x)
# --------------------------------------------------------------------
layer1_shortcut = DownSample(64, 256, 1)
layer1_shortcut.to('cuda:0')
layer1_identity = layer1_shortcut(out)
out = self.layer1_first(out)
out = F.relu(out + layer1_identity, inplace=True)
for i in range(2):
identity = out
out = self.layer1_next(out)
out = F.relu(out + identity, inplace=True)
# --------------------------------------------------------------------
layer2_shortcut = DownSample(256, 512, 2)
layer2_shortcut.to('cuda:0')
layer2_identity = layer2_shortcut(out)
out = self.layer2_first(out)
out = F.relu(out + layer2_identity, inplace=True)
for i in range(3):
identity = out
out = self.layer2_next(out)
out = F.relu(out + identity, inplace=True)
# --------------------------------------------------------------------
layer3_shortcut = DownSample(512, 1024, 2)
layer3_shortcut.to('cuda:0')
layer3_identity = layer3_shortcut(out)
out = self.layer3_first(out)
out = F.relu(out + layer3_identity, inplace=True)
for i in range(22):
identity = out
out = self.layer3_next(out)
out = F.relu(out + identity, inplace=True)
# --------------------------------------------------------------------
layer4_shortcut = DownSample(1024, 2048, 2)
layer4_shortcut.to('cuda:0')
layer4_identity = layer4_shortcut(out)
out = self.layer4_first(out)
out = F.relu(out + layer4_identity, inplace=True)
for i in range(2):
identity = out
out = self.layer4_next(out)
out = F.relu(out + identity, inplace=True)
# --------------------------------------------------------------------
out = self.avg_pool(out)
out = out.reshape(out.size(0), -1)
out = self.fc(out)
return out
(2) ResNet152的model.py模型:
import torch
import torch.nn as nn
from torch.nn import functional as F
class DownSample(nn.Module):
def __init__(self, in_channel, out_channel, stride):
super(DownSample, self).__init__()
self.down = nn.Sequential(
nn.Conv2d(in_channel, out_channel, kernel_size=1, stride=stride, padding=0, bias=False),
nn.BatchNorm2d(out_channel),
nn.ReLU(inplace=True)
)
def forward(self, x):
out = self.down(x)
return out
class ResNet152(nn.Module):
def __init__(self, classes_num): # 指定了分类数目
super(ResNet152, self).__init__()
self.pre = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
# -----------------------------------------------------------------------
self.layer1_first = nn.Sequential(
nn.Conv2d(64, 64, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 256, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(256)
)
self.layer1_next = nn.Sequential(
nn.Conv2d(256, 64, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.Conv2d(64, 256, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(256)
)
# -----------------------------------------------------------------------
self.layer2_first = nn.Sequential(
nn.Conv2d(256, 128, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 128, kernel_size=3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512)
)
self.layer2_next = nn.Sequential(
nn.Conv2d(512, 128, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512)
)
# -----------------------------------------------------------------------
self.layer3_first = nn.Sequential(
nn.Conv2d(512, 256, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 1024, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(1024)
)
self.layer3_next = nn.Sequential(
nn.Conv2d(1024, 256, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 1024, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(1024)
)
# -----------------------------------------------------------------------
self.layer4_first = nn.Sequential(
nn.Conv2d(1024, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 512, kernel_size=3, stride=2, padding=1, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 2048, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(2048)
)
self.layer4_next = nn.Sequential(
nn.Conv2d(2048, 512, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 512, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(512, 2048, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(2048)
)
# -----------------------------------------------------------------------
self.avg_pool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(2048 * 1 * 1, 1000),
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(1000, classes_num)
)
def forward(self, x):
out = self.pre(x)
# -----------------------------------------------------------------------
layer1_shortcut = DownSample(64, 256, 1)
# layer1_shortcut.to('cuda:0')
layer1_identity = layer1_shortcut(out)
out = self.layer1_first(out)
out = F.relu(out + layer1_identity, inplace=True)
for i in range(2):
identity = out
out = self.layer1_next(out)
out = F.relu(out + identity, inplace=True)
# -----------------------------------------------------------------------
layer2_shortcut = DownSample(256, 512, 2)
# layer2_shortcut.to('cuda:0')
layer2_identity = layer2_shortcut(out)
out = self.layer2_first(out)
out = F.relu(out + layer2_identity, inplace=True)
for i in range(7):
identity = out
out = self.layer2_next(out)
out = F.relu(out + identity, inplace=True)
# -----------------------------------------------------------------------
layer3_shortcut = DownSample(512, 1024, 2)
# layer3_shortcut.to('cuda:0')
layer3_identity = layer3_shortcut(out)
out = self.layer3_first(out)
out = F.relu(out + layer3_identity, inplace=True)
for i in range(35):
identity = out
out = self.layer3_next(out)
out = F.relu(out + identity, inplace=True)
# -----------------------------------------------------------------------
layer4_shortcut = DownSample(1024, 2048, 2)
# layer4_shortcut.to('cuda:0')
layer4_identity = layer4_shortcut(out)
out = self.layer4_first(out)
out = F.relu(out + layer4_identity, inplace=True)
for i in range(2):
identity = out
out = self.layer4_next(out)
out = F.relu(out + identity, inplace=True)
# -----------------------------------------------------------------------
out = self.avg_pool(out)
out = out.reshape(out.size(0), -1)
out = self.fc(out)
return out
智能推荐
从本地或者网络读取图片,并转换为Bitmap图片_java 读取网页图像到bitmap-程序员宅基地
文章浏览阅读6.6k次。在做android项目时,我们经常需要从本地或者网络读取图片,并转换为Bitmap图片,以便使用,下面是读取本地图片并转换的方法:Java代码 /** * 得到本地或者网络上的bitmap url - 网络或者本地图片的绝对路径,比如: * * A.网络路径: url="http://blog.foreverlov_java 读取网页图像到bitmap
计算机组成原理|多功能ALU设计实验_设计一个具有8种运算功能的32位alu实验总结-程序员宅基地
文章浏览阅读9.8k次,点赞7次,收藏118次。多功能ALU设计实验一、实验目的与要求实验目的:(1)学习多功能ALU的工作原理,掌握运算器的设计方法(2)掌握运用Verilog HDL 进行行为描述与建模的技巧和方法实验要求:本实验要求设计一个具有8种运算功能的32位ALU,并能够产生运算结果的标志:结果为零标志ZF(Zero Flag)、溢出标志OF(Overflow Flag)。ALU通过3根控制线ALU_OP[2:0]..._设计一个具有8种运算功能的32位alu实验总结
iOS开发进阶之列表加载图片-程序员宅基地
文章浏览阅读484次,点赞10次,收藏5次。列表加载图片通常使用UITableView或UICollectionView,由于列表中内容数量不确定并且对于图片质量要求也不确定,所以对于图片加载的优化是很有必要的。
29、基于51单片机智能消防灭火小车 寻光自动红外壁障车设计_灭火小车设计方案-程序员宅基地
文章浏览阅读1k次,点赞2次,收藏16次。智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。智能小车就是其中的一个体现,本次设计的多功能智能灭火避障小车,以STC89C52单片机作为微控制器,设计出一种可以寻找火源(火源以蜡烛模拟)和自动避开障碍物的小车。通过光敏晶体管传感器检测火源信号当检测到火源,小车自动调整姿态,对准火源。灭火电机启动将蜡烛吹灭实现模拟灭火。通过红外光电开关感应控制小车避障行驶。工作状态实时显示在1602液晶上。_灭火小车设计方案
Ubuntu虚拟机总是死机,然后重启就进不去打不开了怎么办_ubuntu卡死之后重启,打不开了-程序员宅基地
文章浏览阅读4.6k次。从网上搜到的方法都解决不了我的问题,分享一点我自己的实在的解决经验:养成保存快照的习惯,比什么方法都靠谱。 即打开VMWare->虚拟机->快照->拍摄快照,简单填写一下你现在做到的程度,然后点击拍摄快照,存一下,养成习惯,每做出些什么东西了,就存一个快照,哪天莫名其妙又死机了,开机又黑屏进不去了,直接用快照恢复到最近的进度继续做就好。..._ubuntu卡死之后重启,打不开了
随便推点
在Qt中使用CreateProcess打开命令行并执行命令_qt.createqprocess()-程序员宅基地
文章浏览阅读351次。在Qt应用程序中,执行命令行命令并获取输出结果可以使用QProcess类。现在,我们可以在Qt应用程序中调用这个函数来执行命令行命令并获取输出结果。现在,我们可以在Qt应用程序中调用这个函数来执行命令行命令并获取输出结果。在上面的示例中,我们将命令设置为"dir",这将列出当前目录的内容。在上面的示例中,我们将命令设置为"dir",这将列出当前目录的内容。这样,当我们点击按钮时,程序将执行命令并将输出结果显示在文本编辑器中。这样,当我们点击按钮时,程序将执行命令并将输出结果显示在文本编辑器中。_qt.createqprocess()
java logutil_Java日志组件1---Jdk自带Logger(java.util.logging.Logger)-程序员宅基地
文章浏览阅读216次。最近在看日志的一些东西,发现利用JDK自带的log也可以简单的实现日志的输出,将日志写入文件的过程记录如下:1、新建LogUtil.Java(里面写了几个静态方法,为log设置等级、添加log控制台handler、添加log文件输出handler)packagecn.darkranger.log.logger;importjava.io.IOException;importjava.text.S..._logutil.java
此时不应有 \scala\bin\..\lib\jline-2.14.5.jar_c:\users\dell>scala 此时不应有 \scala\bin\..\lib\jline--程序员宅基地
文章浏览阅读221次。scala安装时,此时不应有 \scala\bin…\lib\jline-2.14.5.jar那是因为安装Scala时,默认安装到Program Files (x86)或者Program Files下,但是这俩个文件夹命名存在空格,这是从新安装,选择没有空格存在的文件夹下面即可。谢谢..._c:\users\dell>scala 此时不应有 \scala\bin\..\lib\jline-2.14.5.jar
本地搭建docker仓库的详细步骤_本地安装docker-程序员宅基地
文章浏览阅读1.7k次。在本地创建一个用于存储Docker镜像的目录,比如 /data/docker-registry。如果需要加速拉取公共镜像,可以配置阿里云或DaoCloud等国内提供的Docker镜像加速器。如果需要在其他机器上访问该私有仓库,则需要配置证书。使用docker tag将本地构建好的镜像打标签,并推送到私有仓库中。在官网下载Docker安装包进行安装,具体操作方式可以参考官方文档。至此,本地Docker仓库搭建完成。配置客户端访问证书(可选)拉取Registry镜像。启动Registry容器。_本地安装docker
Docker 停止容器_docker停止运行中的容器-程序员宅基地
文章浏览阅读2w次。使用docker stop停止一个容器docker stop可以用来终止一个正在运行的容器。它的命令格式如下:docker stop [OPTIONS] Container [Container …]其中:docker stop: Docker停止容器的命令关键词;OPTIONS:命令选项,其中-t指定等待多少秒后如果容器还没终止,就强行停止,默认等待10秒;Container:需要启动的容器,该容器用“容器ID”或“容器名”表示,如果指定了多个容器,那么就将这些容器都启动。例如想要停止一个名_docker停止运行中的容器
3DMax主要应用在游戏公司,和建筑动画方面有很多优点如下_游戏建模中哪些东西可以用到公司-程序员宅基地
文章浏览阅读488次。ZBrush、Maya和3dmax的区别?我们知道,做三维设计、建模的软件有很多,最常见的有3DMAX、Maya和ZBrush, 那这几款软件之间有什么区别呢?ZBrush、Maya和3dmax的区别。zbrush首先,我们先来说3DMax和Maya这两款软件。 3DMax和Maya都属于三维制作软件,两者的很多功能基本相同,但是操作上的差异很大。功能上来说,两款软件都可以制作出3D模型,效果图,动画,影视。但是效果,制作方便程度上确实有差别。也不能做那个好那个不好,因为两款软件的定位目标不一样_游戏建模中哪些东西可以用到公司